鲜于海舒(有道高级研发工程师)
随着深度学习算法在图像领域中的成功运用,学术界的目光重新回到神经网络上;而随着 AlphaGo 在围棋领域制造的大新闻,全科技界的目光都聚焦在“深度学习”、“神经网络”这些关键词上。与大众的印象不完全一致的是,神经网络算法并不算是十分高深晦涩的算法;相对于机器学习中某一些数学味很强的算法来说,神经网络算法甚至可以算得上是“简单粗暴”。只是,在神经网络的训练过程中,以及算法的实际运用中,存在着许多困难,和一些经验,这些经验是比较有技巧性的。
有道云笔记不久前更新的文档扫描功能中使用了神经网络算法。本文试图以文档扫描算法中所运用的神经网络算法为线索,聊一聊神经网络算法的原理,以及其在工程中的应用。
一、 背景篇
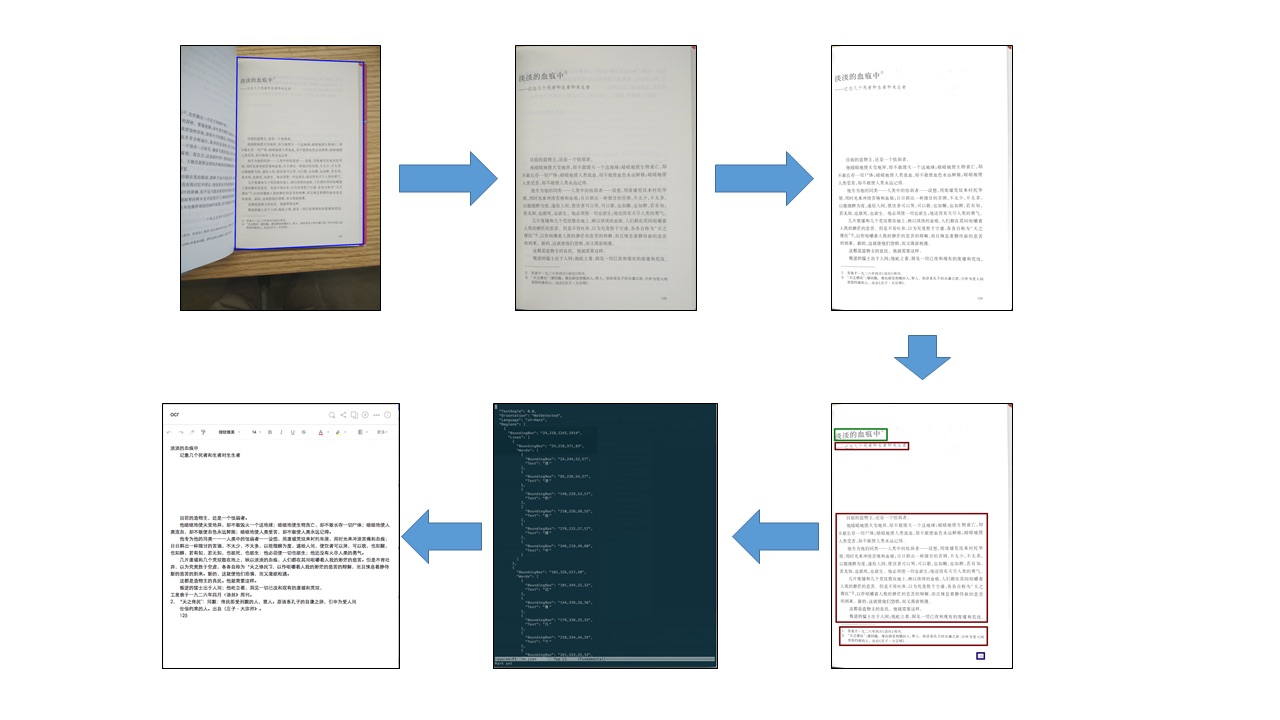
首先介绍一下什么是文档扫描功能。文档扫描功能希望能在用户拍摄的照片中,识别出文档所在的区域,进行拉伸(比例还原),识别出其中的文字,最终得到一张干净的图片或是一篇带有格式的文字版笔记。实现这个功能需要以下这些步骤:
1. 识别文档区域
将文档从背景中找出来,确定文档的四个角;
2. 拉伸文档区域,还原宽高比
根据文档四个角的坐标,根据透视原理,计算出文档原始宽高比,并将文档区域拉伸还原成矩形。这是所有步骤中唯一具有解析算法的步骤
3. 色彩增强
根据文档的类型,选择不同的色彩增强方法,将文档图片的色彩变得干净清洁;
4. 布局识别
理解文档图片的布局,找出文档的文字部分;
5. OCR
将图片形式的“文字”识别成可编码的文字;
6. 生成笔记
根据文档图片的布局,从 OCR 的结果中生成带有格式的笔记。
在上述这些步骤中,“拉伸文档区域”和“生成笔记”是有解析算法或明确规则的,不需要机器学习处理。剩下的步骤中都含有机器学习算法。其中“文档区域识别”和“OCR”这两个步骤我们是采用深度神经网络算法来完成的。
之所以在这两个步骤选择深度神经网络算法,是考虑到其他算法很难满足我们的需求:
- 场景复杂,浅层学习很难很好的学习推广;
同时,深度神经网络的一些难点在这两个步骤中相对不那么困难
- 属于深度神经网络算法所擅长的图像和时序领域;
- 能够获取到大量的数据。能够对这些数据进行明确的标注。
接下来的内容中,我们将展开讲讲“文档区域识别”步骤中的神经网络算法。
二、算法篇
文档区域识别中使用的神经网络算法主要是全卷积网络(FCN)1。在介绍 FCN 前,首先简单介绍一下 FCN 的基础,卷积神经网络(这里假设读者对人工神经网络有最基本的了解)。
(一)卷积神经网络(CNN, Convolutional Neural Networks)
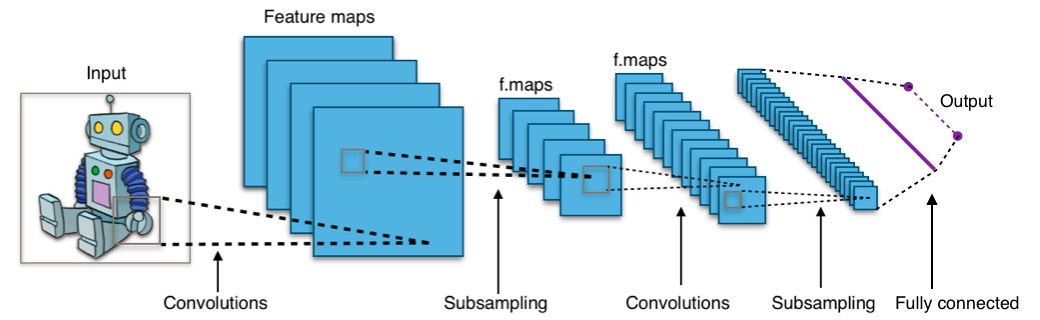
CNN 的每一层并不是一维的,而是有(长, 宽, 通道数)三个维度,例如输入层为一张 rgb 图片,则其输入层三个维度分别是(图片高度, 图片宽度, 3)。
与普通神经网络相比,CNN 有如下特点:
- 第 n 层的某个节点并不和第 n-1 层的所有节点相关,只和它空间位置附近的(n-1层)节点相关;
- 同一层中,所有节点共享权值;
- 每隔若干层会有一个池化(pool)层,其功能是按比例缩小这一层的长和宽(通常是减半)。常用的 pool 方法有局部极大值(Max)和局部均值(Mean)两种。
通过加入若干 pool 层,CNN 中隐层的长和宽不断缩小。当长宽缩小到一定程度(通常是个位数)的时候,CNN 在顶部连接上一个传统的全连接(Fully connected)神经网络,整个网络结构就搭建完成了。
CNN 之所以能够有效,在于它利用了图像中的一些约束。特点1对应着图像的局域相关性(图像上右上角某点跟远处左下角某点关系不大);特点2对应着图像的平移不变性(图像右上角的形状,移动到左下角仍然是那个形状);特点3对应着图像的放缩不变性(图像缩放后,信息丢失的很少)。这些约束的加入,就好比物理中”动量守恒定理“这类发现。守恒定理能让物体的运动可预测,而约束的加入能让识别过程变得可控,对训练数据的需求降低,更不容易出现过拟合。
(二)全卷积网络(FCN, Fully Convolutional Networks)
全卷积网络(FCN)是 CNN 基础上发展起来的算法。与 CNN 不同,FCN 要解决这样的问题:图像的识别目标不是图像级的标签,而是像素级的标签。例如:
- 图像分割 需要将图像根据语义分割成若干类别,其中每一个像素都对应着一个分类结果;
- 边缘检测 需要将图像中的边缘部分和非边缘部分分隔开来,其中每一个像素都对应着“边缘”或“非边缘”。(我们面对的就属于这类问题。)
- 视频分割 将图像分割用在连续的视频图像中。
在 CNN 中,pool 层让隐层的长宽缩小,而 FCN 面对的是完整长宽的标签,如何处理这对矛盾呢?
一个办法是不使用 pool 层,让每一个隐层的长宽都等于完整的长宽。这样做的缺点是,一来计算量相当大,尤其是当运算进行到 CNN 的较高层,通道数达到几百上千的时候;二来不使用 pool 层,卷积就始终是在局域进行,这样识别的结果没有利用到全局信息。
另一个办法是转置卷积(convolution transpose),可以理解为反向操作的 pool 层,或者上采样层,将隐层通过插值放缩回原来的长宽。这正是 FCN 采用的办法。当然,由于 CNN 的最后一个隐层的长宽很小,基本上只有全局信息,如果只对该隐层进行上采样,则局部细节就都丢失了。为此,FCN 会对 CNN 中间的几个隐层进行同样的上采样,由于中间层放缩的程度较低,保留了较多的局部细节,因而上采样的结果也会包含较多的局域信息。最后,将几个上采样的结果综合起来作为输出,这样就能比较好的平衡全局和局域信息。
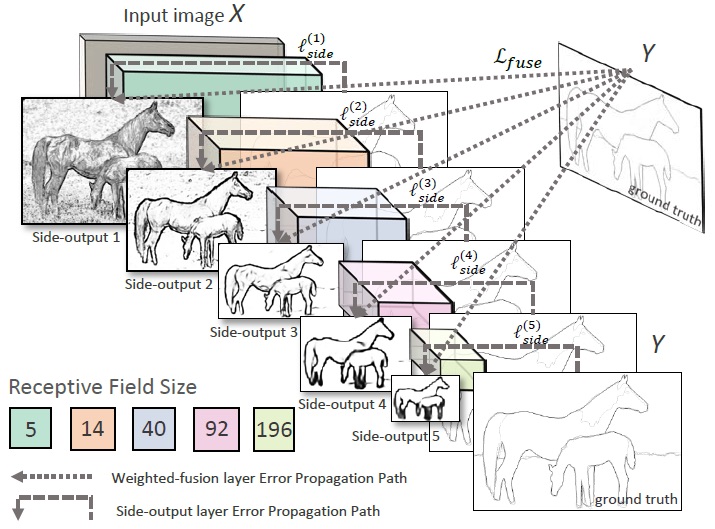
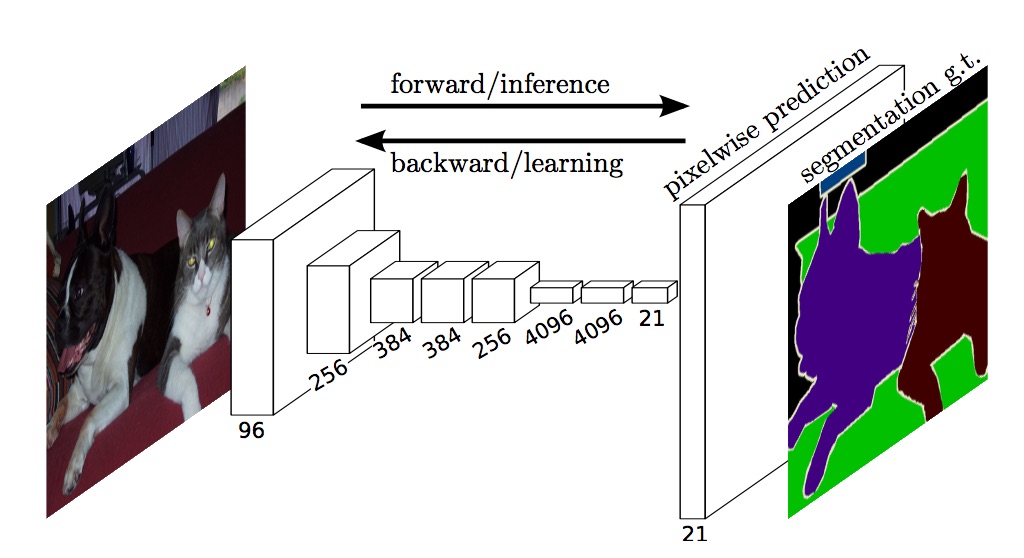
整个 FCN 的结构如上图所示。FCN 去掉了 CNN 在顶部连接的全连接层,在每个转置卷积层之前都有一个分类器,将分类器的输出上采样(转置卷积),然后相加。
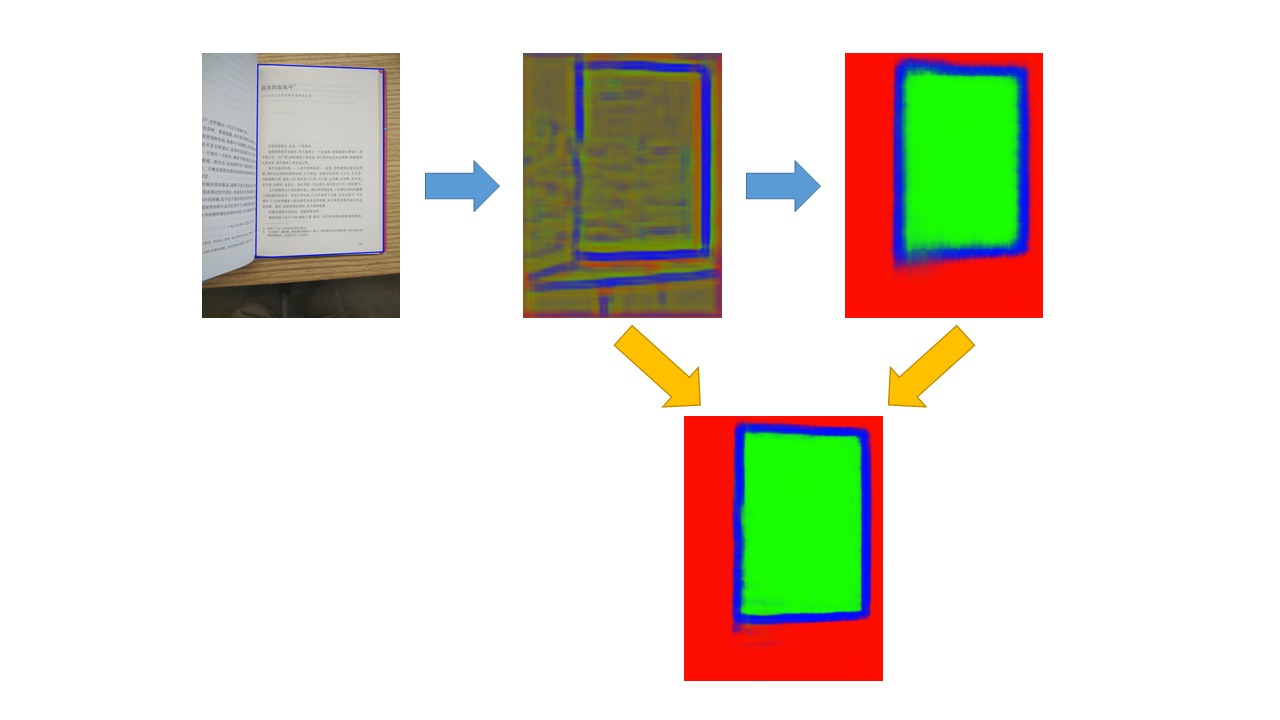
上图是我们实验中真实产生的上采样结果。可以看到,层级较低的隐层保留了很多图片细节,而层级较高的隐层对全局分布理解的比较好。将二者综合起来,得到了既包含全局信息,又没有丢失局域信息的结果。
(三)转置卷积(convolution transpose)
上文中出现的“转置卷积”是怎样实现的呢?顾名思义,转置卷积也是一种卷积操作,只不过是将 CNN 中的卷积操作的 Input 和 Output 的大小反转了过来。https://github.com/vdumoulin/conv_arithmetic 中提供了一系列转置卷积的图示,不过我个人认为更符合原意的转置卷积的图示如下图:
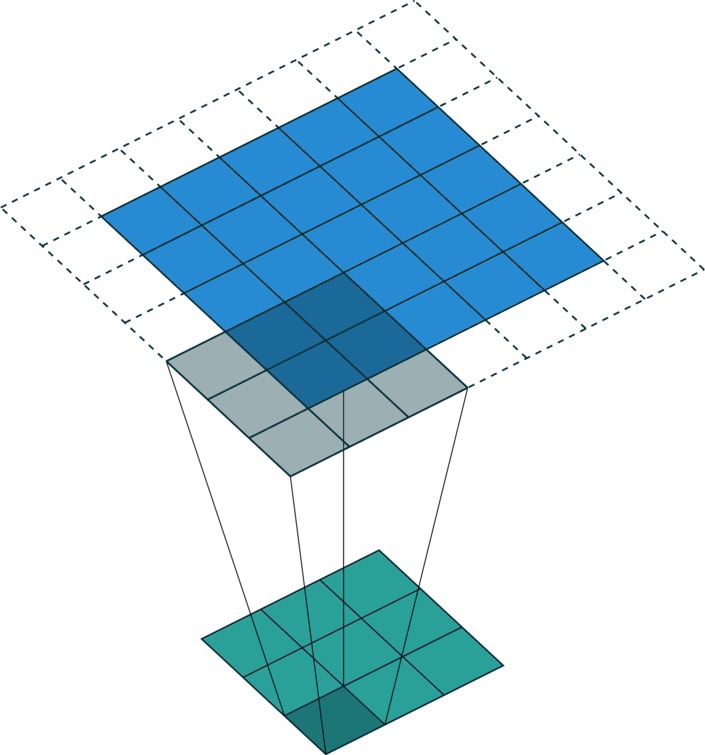
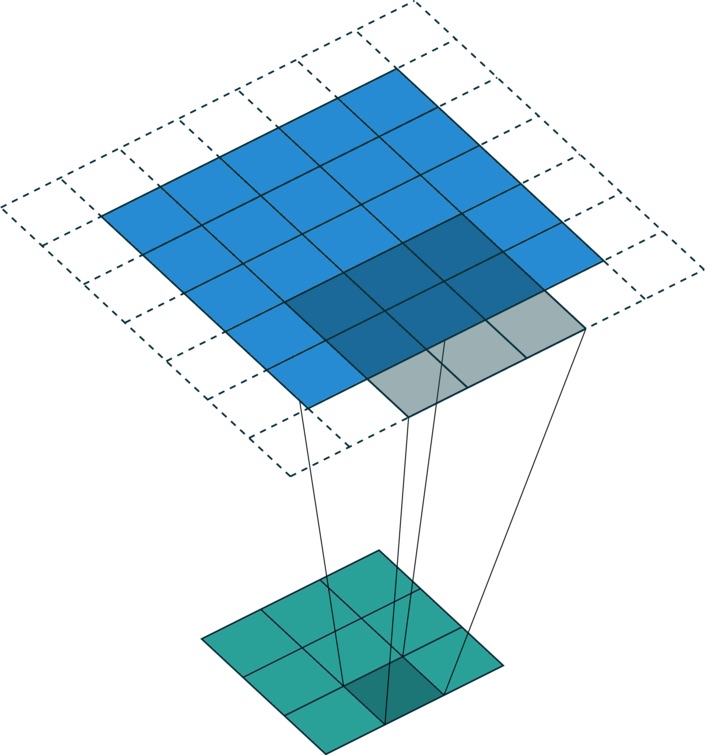
与 conv_arithmetric 提供的图示对比,可以看出上图只是卷积示意图的上下翻转。在实际运算中,Input 层的某个节点数值会(以卷积核为权重)加权相加到与该节点相关的每一个 Output 层节点上。
从维度上来看,如果记卷积核的高、宽为 H 和 W,Input 层的 channel 数为 C,Output 层的 channel 数为 O,那么一次正向卷积的输入节点数为 H * W * C,输出节点数为 O;而一次转置卷积运算的输入节点数为 C ,输出节点数为 H * W * O。
(四)改进的 cross entropy 损失函数
在边缘识别问题中,每一个像素都对应着“边缘-非边缘”中的某一类。于是,我们可以认为每一个像素都是一个训练样本。这会带来一个问题:通常图片中的边缘要远少于非边缘,于是两类样本的数量悬殊。在模式识别问题中,类别不平衡会造成很多不可控的结果,是要极力避免的。
通常面对这种情况,我们会采用对少样本类别进行重复采样(过采样),或是基于原样本的空间分布产生人工数据。然而在本问题中,由于同一张图中包含很多样本,这两种常用的方法都不能进行。该怎么解决样本数量悬殊问题呢?
2015 年 ICCV 上的一篇论文4提出了名为 HED 的边缘识别模型,试着用改变损失函数(Loss Function)的定义来解决这个问题。我们的算法中也采用了这种方法。
首先我们概述一下 CNN 常用的 cross entropy 损失函数。在二分类问题里,cross entropy 的定义如下:

这里 l 为损失值,n 为样本数,k 表示第几个样本,Q 表示标签值,取值为 0 或者 1,p 为分类器计算出来的”该样本属于类别 1 “的概率,在 0 到 1 之间。
这个函数虽然看起来复杂,但如果对它取指数(L=exp(-l)),会发现这是全部样本均预测正确的概率。比如样本集的标签值分别为 (1, 1, 0, 1, 1, 0, …),则:

这里 L 是似然函数,也就是全部样本均预测正确的概率。
HED 使用了加权的 cross entropy 函数。例如,当标签 0 对应的样本极少时,加权 cross entropy 函数定义为:

这里 W 为权重,需要大于 1。不妨设 W = 2,此时考虑似然函数:

可见类别为 0 的样本在似然函数中重复出现了,比重因此而增加。通过这种办法,我们虽然不能实际将少样本类别的样本数目扩大,却通过修改损失函数达到了基本等价的效果。
三、数据篇
文档区域识别中用到的神经网络算法就介绍到这里了,接下来聊一聊我们为训练这个神经网络所构建的数据集。
(一)数据筛选
为了训练神经网络模型,我们标注了样本容量为五万左右的数据集。然而这些数据集中存在大量的坏数据,需要对数据进行进一步筛选。
五万左右的数据集,只凭人工来进行筛选成本太高了。好在根据网络的自由度等一些经验判断,我们的网络对数据集的大小要求尚没有那么高,数据集还算比较富足,可以允许一部分好的数据被错筛掉。
基于这一前提,我们人工标注了一个小训练集(500张),训练了一个 SVM 分类器来自动筛选数据。这个分类器只能判断图片中是否含有完整的文档,且分类效果并不特别强。不过,我们有选择性的强调了分类器分类的准确率,而对其召回率要求不高。换而言之,这个分类器可以接受把含有文档的图片错分成了不含文档的图片,但不能接受把不含文档的图片分进了含有文档的图片这一类中。
依靠这个分类器,我们将五万左右的数据集筛选得到了一个九千左右的较小数据集。再加上人工筛选,最终剩下容量为八千左右的,质量有保证的数据集。
四、实现篇
在模型训练中,我们使用 tensorflow 框架5进行模型训练。我们的最终目标是在移动端(手机端)实现文档区域识别功能,而移动端与桌面端存在着一些区别:
- 移动端的运算能力全方位的弱于桌面端;
- 带宽和功耗端限制,决定了移动端的显卡尤其弱于桌面端的独显;
- 移动端有 ios 和 Android 两个阵营,它们对密集运算的优化 API 各不相同,代码很难通用;
- 移动端对文件体积敏感。
这些区别使得我们不能直接将模型移植到移动端,而需要对它们做一些优化,保证其运行效率。优化的思路大致有两种:
- 选择合适的神经网络框架,尽可能用上芯片的加速技术;
- 压缩模型,在不损失精度的前提下减小模型的计算开销和文件体积。
(一)神经网络框架的选择
目前比较流行的神经网络框架包括 tensorflow, caffe6, mxnet7 等,它们大多数都有相应的移动端框架。所以直接使用这些移动端框架是最方便的选择。例如我们使用 tensorflow 框架进行模型训练,那么直接使用移动端 tensorflow 框架,就能省去模型转换的麻烦。
有的时候,我们可能不需要一个大而全的神经网络框架,或者对运行效率要求特别高。此时我们可以考虑一个底层一些的框架,在此基础上实现自己的需求。这方面的例子有 Eigen8,一个常用的矩阵运算库;NNPACK9,效率很高的神经网络底层库,等等。如果代码中已经集成了 OpenCV10,也可以考虑用其中的运算 API。
如果对运行效率要求很高,也可以考虑使用移动端的异构计算框架,将除 CPU 以外的 GPU、DSP 的运算能力也加入进来。这方面可以考虑的框架有 ios 端的 metal11,跨平台的 OpenGL12 和 Vulkan13,Android 端的 renderscript14。

(二)模型压缩
模型压缩最简单的方法就是去调节网络模型中各个可调的超参数,这里的超参数的例子有:网络总层数、每一层的 channel 数、每一个卷积的 kernel 宽度 等等。在一开始训练的时候,我们会选择有一定冗余的超参数去训练,确保不会因为某个超参数太小而成为网络效果的瓶颈。在模型压缩的时候,则可以把这些冗余“挤掉”,即在不明显降低识别准确率的前提下,逐步尝试调小某个超参数。在调节的过程中,我们发现网络总层数对识别效果的影响较大;相对而言,每一层的 channel 数的减小对识别效果的影响不大。
除了简单的调节超参数外,还有一些特别为移动端设计的模型结构,采用这些模型结构能显著的压缩模型。这方面的例子有 SVD Network15, SqueezeNet16, Mobilenets17等,这里就不细说了。
(三)最终效果
经过神经网络框架定制、模型压缩后,我们的模型大小被压缩到 1M 左右,在性能主流的手机(iphone 6, 小米 4 或配置更好的手机)上能达到 100ms 以内识别一张图片的速度,且识别精度基本没有受到影响。应该说移植是很成功的。
五、总结
在两三年之前,神经网络算法在大家的眼里只适用于运算能力极强的服务器,似乎跟手机没有什么关联。然而在近两三年,出现了一些新的趋势:一是随着神经网络算法的成熟,一部分学者将研究兴趣放在了压缩神经网络的计算开销上,神经网络模型可以得到压缩;二是手机芯片的运算能力飞速发展,尤其是 GPU,DSP 运算能力的发展。伴随这一降一升,手机也能够得着神经网络的运算需求了。
“基于神经网络的文档扫描”功能得以实现,实在是踩在了无数前人的肩膀上完成的。从这个角度来说,我们这一代的研发人员是幸运的,能够实现一些我们过去不敢想象的东西,未来还能实现更多我们今天不能想象的东西。
参考文献
- Long, J., Shelhamer, E., & Darrell, T. (2015). Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (pp. 3431-3440).↩
- Hubel, D. H., & Wiesel, T. N. (1962). Receptive fields, binocular interaction and functional architecture in the cat’s visual cortex. The Journal of physiology, 160(1), 106-154.↩
- LeCun, Y., Bottou, L., Bengio, Y., & Haffner, P. (1998). Gradient-based learning applied to document recognition. Proceedings of the IEEE, 86(11), 2278-2324.↩
- Xie, S., & Tu, Z. (2015). Holistically-nested edge detection. In Proceedings of the IEEE International Conference on Computer Vision (pp. 1395-1403).↩
- https://www.tensorflow.org/↩
- http://caffe.berkeleyvision.org/↩
- http://mxnet.io/↩
- http://eigen.tuxfamily.org/index.php?title=Main_Page↩
- https://github.com/Maratyszcza/NNPACK↩
- http://opencv.org/↩
- https://developer.apple.com/metal/↩
- https://www.opengl.org/↩
- https://www.khronos.org/vulkan/↩
- https://developer.android.com/guide/topics/renderscript/compute.html↩
- Denton, E. L., Zaremba, W., Bruna, J., LeCun, Y., & Fergus, R. (2014). Exploiting linear structure within convolutional networks for efficient evaluation. In Advances in Neural Information Processing Systems (pp. 1269-1277).↩
- Iandola, F. N., Han, S., Moskewicz, M. W., Ashraf, K., Dally, W. J., & Keutzer, K. (2016). SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and< 0.5 MB model size. arXiv preprint arXiv:1602.07360.↩
- Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D., Wang, W., Weyand, T., … & Adam, H. (2017). Mobilenets: Efficient convolutional neural networks for mobile vision applications. arXiv preprint arXiv:1704.04861.↩

 微信
微信

 新浪微博
新浪微博

 有道云笔记
有道云笔记